Author: Richard Paulch
What can different disciplines say about learning and negotiation, using robots as an example? Here we discuss the experiences gathered during the workshop “Robots in heterogeneous contexts: Negotiation of co-creative lifelong learning spaces through participatory approaches”. The workshop was integrated into the 20th European Conference on Computer-Supported Cooperative Work (ECSCW).
With other events, the workshop on Monday, June 27, 2022, provided the kick-off for the ECSCW 2022 conference and allowed international researchers from an interdisciplinary perspective to address the topic of learning and exchange regarding human-robot interaction.

Church of the Colégio de Santo António da Estrela
This time the ESCSW conference took place in summerly Coimbra, a university city in Portugal with an impressive history and long academic tradition. The location of the workshop was a former church building, which provided a unique and memorable atmosphere for those involved.
Hybrid Session
A special aspect of this workshop was its hybrid organization. In addition to the researchers on site, some researchers also took part online. This allowed the event to be more flexible and accessible, but it was also a technical challenge. So, the organizers team (with the help of the student volunteers) reached the building directly in the morning, to set up the equipment and make sure that everything is functioning.

Our workshop focused on contributing to how co-creative learning spaces can be supported in heterogeneous contexts and what different disciplines can say about learning and negotiation using robots as an example.
The event began with a round of introductions in which all participants could get to know each other and engage in an initial dialogue. This was followed by the presentations prepared by the participants. Before the workshop, each participant sent out a short text that addressed the interconnection between learning, space, and embodiment in human-robot interaction from their own scientific perspective. The written contributions can be found on our workshop page.
The diverse background of participants allowed for a variety of heterogeneous contexts to be considered. One topic that emerged during the workshop was robotic systems in nursing. In addition, one contribution also referred to the industrial context and emphasized the relevance of learning with robots in this regard. In the presentation by Kirsten Brukamp, the emphasis was on patient autonomy, quality of life and individual learning effects. This was related to how relief potentials can be established in nursing. In the industrial context, Florian Lay referred to how the monotony of work structures can be reduced, and the skills of robots and workers can form a mixed skill zone. Mathias Klingner highlighted the specificity of the care environment and with what challenges the requirements for robots are associated. “Wishes can be hurdles,” was an aspect that was also talked about in the discussion. Finally, Elisabeth Raß addressed the problem of the COVID-19 pandemic for establishing a PraxLab, a form of Living Lab, in nursing homes. For the research to succeed, people are needed who actively support the research and take on the role of facilitators.
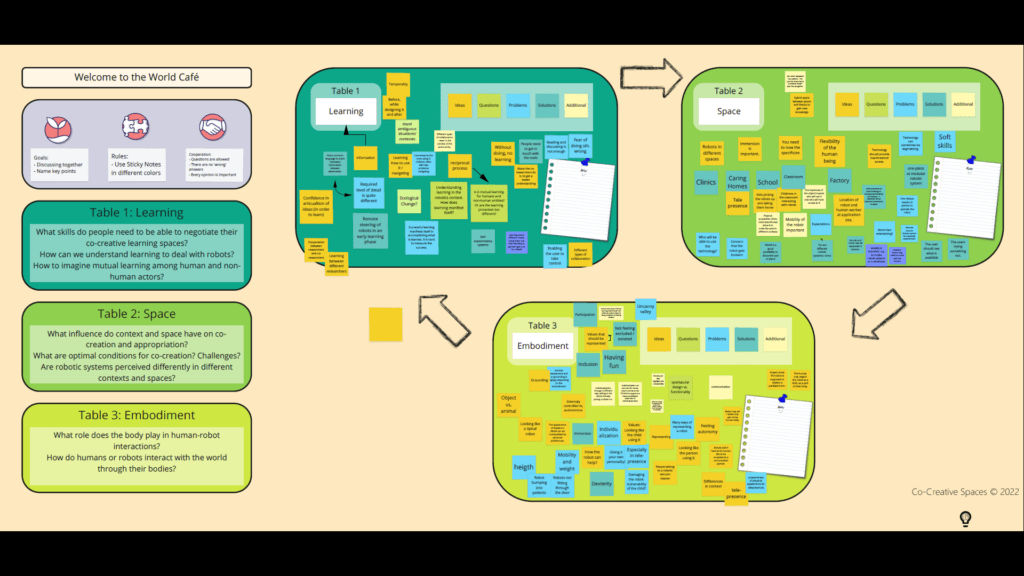
After a question-and-answer session and coffee break, we proceeded to a World Café format in which key aspects were discussed with the participants: learning, space, and embodiment.
We concluded the workshop with a joint discussion. We explored questions as to which values people ascribe to robots and which values promote or hinder robots. Regarding the body, we also discussed how working with vulnerable people mediates this process and what role certain spaces, such as nursing homes, play in this respect. Ultimately, we identified different types of learning processes related to robots and different phases of design (e.g., learning to use a robot, design discoveries, and learning during the co-design process).
Our workshop helped us understand that there are different types of mutual learning in human-robot interaction, and we also need to work out how exactly these learning processes take place and find out what the different forms of learning are. It is important how learning becomes part of the socio-technically mediated work and everyday life of people.
The extended workshop description with theoretical and methodological background can be found in the EUSSET Digital Library.
Ultimately, after the fruitful cooperation during the workshop, the organizers of the event plan to publish the revised versions of the participants’ contributions.